Ref: http://arxiv.org/abs/0711.3220
Fourvector algebra
Author: Diego Saa (Submitted on 20 Nov 2007)
Abstract: The algebra of fourvectors is described. The fourvectors are more appropriate than the Hamilton quaternions for its use in Physics and the sciences in general. The fourvectors embrace the 3D vectors in a natural form. It is shown the excellent ability to perform rotations with the use of fourvectors, as well as their use in relativity for producing Lorentz boosts, which are understood as simple rotations.
axiom
_*_*(x,y)==concat(x(1) * y(1) + dot(x(2..), y(2..)), x(1) * y(2..) - x(2..) * y(1) + cross(x(2..), y(2..)))
Type: Void
axiom
e:Vector INT:=[1,0,0,0]
Type: Vector Integer
axiom
i:Vector INT:=[0,1,0,0]
Type: Vector Integer
axiom
j:Vector INT:=[0,0,1,0]
Type: Vector Integer
axiom
k:Vector INT:=[0,0,0,1]
Type: Vector Integer
axiom
test(e**e=e) and _
test(i**i=e) and _
test(j**j=e) and _
test(k**k=e) and _
test(e**i=i) and _
test(e**j=j) and _
test(e**k=k) and _
test(i**e=-i) and _
test(j**e=-j) and _
test(k**e=-k) and _
test(i**j=k) and _
test(j**i=-k) and _
test(k**i=j) and _
test(i**k=-j) and _
test(j**k=i) and _
test(k**j=-i)
axiom
Compiling function ** with type (Vector Integer,Vector Integer) ->
Vector IntegerType: Boolean
Axiom has a domain for NonAssociative? Algebra
This is documented in the article:
Computations in Algebras of Fixed Rank by Johannes Grabmeir and Robert Wisbauer, from the book "Computational Algebra"
By Klaus G. Fischer, Philippe Loustaunau, Jay Shapiro.
The algebra above can be given by structural constants.
axiom
)clear all
All user variables and function definitions have been cleared.
sc:Vector Matrix Fraction Integer := [ _
[[ 1, 0, 0, 0], _
[ 0, 1, 0, 0], _
[ 0, 0, 1, 0], _
[ 0, 0, 0, 1]], _
[[ 0, 1, 0, 0], _
[-1, 0, 0, 0], _
[ 0, 0, 0, 1], _
[ 0, 0,-1, 0]], _
[[ 0, 0, 1, 0], _
[ 0, 0, 0,-1], _
[-1, 0, 0, 0], _
[ 0, 1, 0, 0]], _
[[ 0, 0, 0, 1], _
[ 0, 0, 1, 0], _
[ 0,-1, 0, 0], _
[-1, 0, 0, 0]]];
Type: Vector Matrix Fraction Integer
axiom
V:=AlgebraGivenByStructuralConstants(Fraction Integer, 4, [e,i,j,k],sc)
Type: Domain
Multiplication
Type: Vector AlgebraGivenByStructuralConstants
?(Fraction Integer,4,[e,i,j,k]
?,[MATRIX,MATRIX,MATRIX,MATRIX]
?)
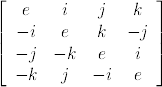
axiom
matrix([[(a.i * a.j) for j in 1..4] for i in 1..4])$OutputForm
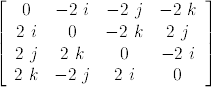
Commutator and Associator
axiom
matrix([[commutator(a.x,a.y) for x in 1..4] for y in 1..4])$OutputForm
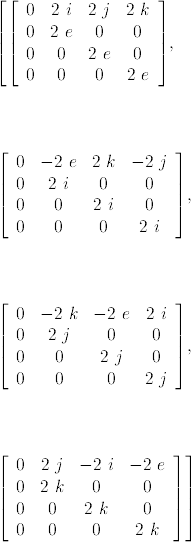
axiom
[matrix([[associator(a.x,a.y,a.z) for x in 1..4] for y in 1..4])$OutputForm for z in 1..4]
axiom
for x in 1..4 repeat
for y in 1..4 repeat
for z in 1..4 repeat
if associator(a.x,a.y,a.z) ~= 0$V then
output([[a.x,a.y,a.z],"=",associator(a.x,a.y,a.z)])
[[i,e,e],"=",2i]
[[i,e,i],"=",- 2e]
[[i,e,j],"=",- 2k]
[[i,e,k],"=",2j]
[[i,i,e],"=",2e]
[[i,i,i],"=",2i]
[[i,i,j],"=",2j]
[[i,i,k],"=",2k]
[[j,e,e],"=",2j]
[[j,e,i],"=",2k]
[[j,e,j],"=",- 2e]
[[j,e,k],"=",- 2i]
[[j,j,e],"=",2e]
[[j,j,i],"=",2i]
[[j,j,j],"=",2j]
[[j,j,k],"=",2k]
[[k,e,e],"=",2k]
[[k,e,i],"=",- 2j]
[[k,e,j],"=",2i]
[[k,e,k],"=",- 2e]
[[k,k,e],"=",2e]
[[k,k,i],"=",2i]
[[k,k,j],"=",2j]
[[k,k,k],"=",2k]
Type: Void
Volume form?
axiom
a.2 * (a.3 * a.4) = (a.2 * a.3) * a.4
Type: Equation AlgebraGivenByStructuralConstants
?(Fraction Integer,4,[e,i,j,k]
?,[MATRIX,MATRIX,MATRIX,MATRIX]
?)
Check standard properties
Type: Union(AlgebraGivenByStructuralConstants
?(Fraction Integer,4,[e,i,j,k]
?,[MATRIX,MATRIX,MATRIX,MATRIX]
?),...)
axiom
rightUnit()$V
this algebra has no right unit
Type: Union("failed",...)
axiom
alternative?()$V
algebra is not left alternative
Type: Boolean
axiom
leftAlternative?()$V
algebra is not left alternative
Type: Boolean
axiom
rightAlternative?()$V
algebra is not right alternative
Type: Boolean
axiom
associative?()$V
algebra is not associative
Type: Boolean
axiom
antiAssociative?()$V
algebra is not anti-associative
Type: Boolean
axiom
--powerAssociative?()$V
commutative?()$V
algebra is not commutative
Type: Boolean
axiom
jordanAlgebra?()$V
algebra is not commutative
this is not a Jordan algebra
Type: Boolean
axiom
jordanAdmissible?()$V
algebra is not Jordan admissible
Type: Boolean
axiom
noncommutativeJordanAlgebra?()$V
algebra is not flexible
this is not a noncommutative Jordan algebra, as it is not flexible
Type: Boolean
axiom
lieAlgebra?()$V
algebra is not anti-commutative
this is not a Lie algebra
Type: Boolean
axiom
lieAdmissible?()$V
algebra is not Lie admissible
Type: Boolean
axiom
jacobiIdentity?()$V
Jacobi identity does not hold
Type: Boolean
Commuting elements
axiom
V has FramedNonAssociativeAlgebra(Fraction Integer)
Type: Boolean
axiom
basisOfCommutingElements()$AlgebraPackage(Fraction Integer,V)
Type: List AlgebraGivenByStructuralConstants
?(Fraction Integer,4,[e,i,j,k]
?,[MATRIX,MATRIX,MATRIX,MATRIX]
?)
axiom
basisOfCenter()$AlgebraPackage(Fraction Integer,V)
Type: List AlgebraGivenByStructuralConstants
?(Fraction Integer,4,[e,i,j,k]
?,[MATRIX,MATRIX,MATRIX,MATRIX]
?)
axiom
basisOfCentroid()$AlgebraPackage(Fraction Integer,V)
Type: List Matrix Fraction Integer
axiom
basisOfNucleus()$AlgebraPackage(Fraction Integer,V)
Type: List AlgebraGivenByStructuralConstants
?(Fraction Integer,4,[e,i,j,k]
?,[MATRIX,MATRIX,MATRIX,MATRIX]
?)
axiom
basisOfLeftNucloid()$AlgebraPackage(Fraction Integer,V)
Type: List Matrix Fraction Integer
Symbolic computations
axiom
G:=GenericNonAssociativeAlgebra(Fraction Integer, 4, [e,i,j,k],sc)
Type: Domain
Look for Idempotents
axiom
conditionsForIdempotents()$G
Type: List Polynomial Fraction Integer
axiom
gb:=groebnerFactorize %
Type: List List Polynomial Fraction Integer
axiom
associatorDependence()$G
Type: List Vector Fraction Polynomial Fraction Integer
axiom
q:=leftRankPolynomial()$G
Type: SparseUnivariatePolynomial
? Fraction Polynomial Fraction Integer
axiom
map(factor,coefficients q)
Type: List Factored Fraction Polynomial Fraction Integer
axiom
rightUnit()$G
this algebra has no right unit
Type: Union("failed",...)
axiom
p1:=generic([x1,y1,z1,w1])$G
Type: GenericNonAssociativeAlgebra
?(Fraction Integer,4,[e,i,j,k]
?,[MATRIX,MATRIX,MATRIX,MATRIX]
?)
axiom
p2:=generic([x2,y2,z2,w2])$G
Type: GenericNonAssociativeAlgebra
?(Fraction Integer,4,[e,i,j,k]
?,[MATRIX,MATRIX,MATRIX,MATRIX]
?)
axiom
p3:=generic([x3,y3,z3,w3])$G
Type: GenericNonAssociativeAlgebra
?(Fraction Integer,4,[e,i,j,k]
?,[MATRIX,MATRIX,MATRIX,MATRIX]
?)
Type: Union(GenericNonAssociativeAlgebra
?(Fraction Integer,4,[e,i,j,k]
?,[MATRIX,MATRIX,MATRIX,MATRIX]
?),...)
axiom
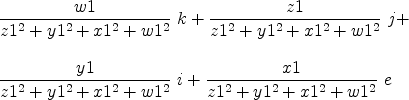
rightRecip(p1)$G
this algebra has no right unit
Type: Union("failed",...)
axiom
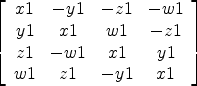
leftRegularRepresentation(p1)
Type: Matrix Fraction Polynomial Fraction Integer
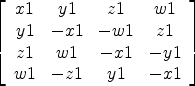
axiom
rightRegularRepresentation(p1)
Type: Matrix Fraction Polynomial Fraction Integer
axiom
associator(p1,p2,p3)$G
Type: GenericNonAssociativeAlgebra
?(Fraction Integer,4,[e,i,j,k]
?,[MATRIX,MATRIX,MATRIX,MATRIX]
?)