|
|
|
last edited 12 years ago by Bill Page |
Edit detail for SandBox Categorical Relativity revision 5 of 11
| 1 2 3 4 5 6 7 8 9 10 11 | ||
|
Editor: Bill Page
Time: 2009/08/04 16:05:42 GMT-7 |
||
| Note: fix links | ||
Special relativity without Lorentz transformations.
Here are some sample computations based on papers by Z. Oziewicz
- How do you add relative velocities?
- What Is Categorical Relativity?
In categorical relativity the inverse relative velocity morphism
 is observer dependent, and not absolute as in the usual formulation where
is observer dependent, and not absolute as in the usual formulation where
 .
.
and the book by T. Matolcsi
See also the slides: SandBoxRelativeVelocity (presented at IARD 2006).
Mathematical Preliminaries
A vector is represented as a nx1 matrix (column vector)
 Then a row vector is
Then a row vector is
 Inner product is
Inner product is
 and tensor product is
and tensor product is

Applying the Lorentz form produces a row vector
 or a scalar
or a scalar
 For difficult verifications it is sometimes convenient to replace
symbols by random numerical values.
For difficult verifications it is sometimes convenient to replace
symbols by random numerical values.
 The AlgebraicNumber domain can test for numerical equality of complicated
expressions involving
The AlgebraicNumber domain can test for numerical equality of complicated
expressions involving  .
.

Massive Objects
An object (also referred to as an obserser) is represented by a
time-like 4-vector
 Associated with each such vector is the orthogonal 3-d Euclidean subspace
Associated with each such vector is the orthogonal 3-d Euclidean subspace

Relative Velocity
An object Q has a unique relative velocity w(P,Q) with respect
to object P given by

Lorentz factor

Binary Boost

Observer P measures velocity u. u is space-like and in  .
.

u is velocity of object Q

Observer Q is u-boost of P

Inverse velocity is measured by Q
Inverse velocity is not reciprocal

Object P is u'-boost of Q

Objects P and Q are completely determined by velocities u and u'

The magnitude of the inverse velocity is the same as the velocity

Collinear Velocities
Suppose the velocity v of some object L is collinear with reciprocal velocity u':
 |
Composition of collinear velocities
For velocity v collinear with reciprocal velocity u' we have Matolcsi (4.3.3)

General addition of relative velocities (Oziewicz)


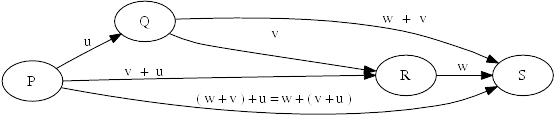
Associativity
Unlike Einstein addition of velocities, addition of relative velocities is associative:
 |
Unfortunately Axiom is not able to evaluate all of these in a reasonable
amount of time (within the 1 minute wiki limit).


Some or all expressions may not have rendered properly, because Axiom returned the following error:
Error: export AXIOM=/usr/local/lib/fricas/target/x86_64-unknown-linux; export ALDORROOT=/usr/local/aldor/linux/1.1.0; export PATH=PATH; export HOME=/var/zope2/var/LatexWiki; ulimit -t 120; $AXIOM/bin/AXIOMsys < /var/zope2/var/LatexWiki/3933104534659023437-25px.axm
Checking for foreign routines AXIOM="/usr/local/lib/fricas/target/x86_64-unknown-linux" spad-lib="/usr/local/lib/fricas/target/x86_64-unknown-linux/lib/libspad.so" foreign routines found openServer result -2 FriCAS (AXIOM fork) Computer Algebra System Version: FriCAS 2009-10-10 Timestamp: Tuesday October 13, 2009 at 18:58:11 ----------------------------------------------------------------------------- Issue )copyright to view copyright notices. Issue )summary for a summary of useful system commands. Issue )quit to leave FriCAS and return to shell. -----------------------------------------------------------------------------
(1) -> (1) -> (1) -> (1) -> (1) -> vect(x:List Expression Integer):Matrix Expression Integer == matrix map(y+->[y],x)
Function declaration vect : List(Expression(Integer)) -> Matrix( Expression(Integer)) has been added to workspace. Type: Void vect [a1,a2,a3]
Compiling function vect with type List(Expression(Integer)) -> Matrix(Expression(Integer))
 |
Type: Matrix(Expression(Integer)) (3) -> transpose(vect [a1,a2,a3])
 |
Type: Matrix(Expression(Integer)) (4) -> transpose(vect [a1,a2,a3])*vect [b1,b2,b3]
 |
Type: Matrix(Expression(Integer)) (5) -> vect [a1,a2,a3]*transpose(vect [b1,b2,b3])
 |
Type: Matrix(Expression(Integer)) (6) -> g(x)==transpose(x)*diagonalMatrix [-1,1,1,1]
Type: Void (7) -> g(x,y)== (transpose(x)*diagonalMatrix([-1,1,1,1])*y)::EXPR INT
Type: Void (8) -> possible(x)==subst(x, map(y+->(y=(random(100) - random(100))),variables x) )
Type: Void Is?(eq:Equation EXPR INT):Boolean == (lhs(eq)-rhs(eq)=0)::Boolean
Function declaration Is? : Equation(Expression(Integer)) -> Boolean has been added to workspace. Type: Void Is2?(eq:Equation(Matrix(EXPR(INT)))):Boolean == ( (lhs(eq)-rhs(eq)) :: Matrix Expression AlgebraicNumber = zero(nrows(lhs(eq)),ncols(lhs(eq)))$Matrix Expression AlgebraicNumber )::Boolean
Function declaration Is2? : Equation(Matrix(Expression(Integer))) -> Boolean has been added to workspace. Type: Void (11) -> IsPossible?(eq:Equation EXPR INT):Boolean == _ (possible(lhs(eq)-rhs(eq)) :: Expression AlgebraicNumber=0)::Boolean
Function declaration IsPossible? : Equation(Expression(Integer)) -> Boolean has been added to workspace. Type: Void IsPossible2?(eq:Equation(Matrix(EXPR(INT)))):Boolean == ( map(possible,(lhs(eq)-rhs(eq))) :: Matrix Expression AlgebraicNumber = zero(nrows(lhs(eq)),ncols(lhs(eq)))$Matrix Expression AlgebraicNumber )::Boolean
Function declaration IsPossible2? : Equation(Matrix(Expression( Integer))) -> Boolean has been added to workspace. Type: Void (13) -> P:=vect [sqrt(p1^2+p2^2+p3^2+1),p1,p2,p3];
Type: Matrix(Expression(Integer)) g(P,P)
Compiling function g with type (Matrix(Expression(Integer)),Matrix( Expression(Integer))) -> Expression(Integer)
 |
Type: Expression(Integer) Q:=vect [sqrt(q1^2+q2^2+q3^2+1),q1,q2,q3];
Type: Matrix(Expression(Integer)) g(Q,Q)
 |
Type: Expression(Integer) (17) -> w(P,Q)==-Q/g(P,Q)-P
Type: Void (18) -> gamma(v)==1/sqrt(1-g(v,v))
Type: Void (19) -> b(P,v)==gamma(v)*(P+v)
Type: Void (20) -> u:=w(P,Q);
Compiling function w with type (Matrix(Expression(Integer)),Matrix( Expression(Integer))) -> Matrix(Expression(Integer))
Type: Matrix(Expression(Integer)) g(P,u)
 |
Type: Expression(Integer) possible(g(u,u))::EXPR Float
Compiling function possible with type Expression(Integer) -> Expression(Integer)
 |
Type: Expression(Float) (23) -> IsPossible?(gamma(u)=-g(P,Q))
Compiling function gamma with type Matrix(Expression(Integer)) -> Expression(Integer) Compiling function IsPossible? with type Equation(Expression(Integer )) -> Boolean
 |
Type: Boolean (24) -> IsPossible?(g(Q,u)=gamma(u)-1/gamma(u))
 |
Type: Boolean (25) -> IsPossible2?(Q=b(P,u))
Compiling function b with type (Matrix(Expression(Integer)),Matrix( Expression(Integer))) -> Matrix(Expression(Integer)) Compiling function IsPossible2? with type Equation(Matrix(Expression (Integer))) -> Boolean
 |
Type: Boolean (26) -> u' := w(Q,P);
Type: Matrix(Expression(Integer)) g(Q,u')
 |
Type: Expression(Integer) (28) -> IsPossible2?(-u=u')
 |
Type: Boolean (29) -> IsPossible2?(P=b(Q,u'))
 |
Type: Boolean (30) -> IsPossible2?(P = -1/g(u,u)*(u+u'/gamma(u)))
 |
Type: Boolean IsPossible2?(Q = -1/g(u,u)*(u'+u/gamma(u)))
 |
Type: Boolean (32) -> IsPossible?(g(u,u)=g(u',u'))
 |
Type: Boolean (33) -> v := alpha*u';
Type: Matrix(Expression(Integer)) L := b(Q,v);
Type: Matrix(Expression(Integer)) Is2?(v=w(Q,L))
Compiling function Is2? with type Equation(Matrix(Expression(Integer ))) -> Boolean
 |
Type: Boolean (36) -> Is2?(w(P,L)=(u-alphau)/(1-alphag(u,u)))
 |
Type: Boolean (37) -> addition(v,u,u') == ( u + v/gamma(u) - g(v,u')/g(u,u)*(u + u'/gamma(u)) ) / (1-g(v,u'))
Type: Void (38) -> Is2?(w(P,L)=addition(v,u,u'))
Compiling function addition with type (Matrix(Expression(Integer)), Matrix(Expression(Integer)),Matrix(Expression(Integer))) -> Matrix(Expression(Integer))
 |
Type: Boolean IsPossible2?(w(P,L)=addition(w(Q,L),w(P,Q),w(Q,P)))
 |
Type: Boolean (40) -> R:=vect [sqrt(r1^2+r2^2+r3^2+1),r1,r2,r3];
Type: Matrix(Expression(Integer)) g(R,R)
 |
Type: Expression(Integer) S:=vect [sqrt(s1^2+s2^2+s3^2+1),s1,s2,s3];
Type: Matrix(Expression(Integer)) g(S,S)
 |
Type: Expression(Integer) (44) -> --IsPossible2?(w(P,R)=addition(w(Q,R),w(P,Q),w(Q,P))) --IsPossible2?(w(R,P)=addition(w(Q,P),w(R,Q),w(Q,R))) IsPossible2?(w(Q,S)=addition(w(R,S),w(Q,R),w(R,Q)))